Andy
2010
Stats
| Record | 12-08-01 |
|---|---|
| MAR Rank | N/A |
| Drive Team | Andy Borowski, Eric Principato, Matt Banziger, Peter Wolfe |
| Awards | Boston Regional Industrial Design Award |
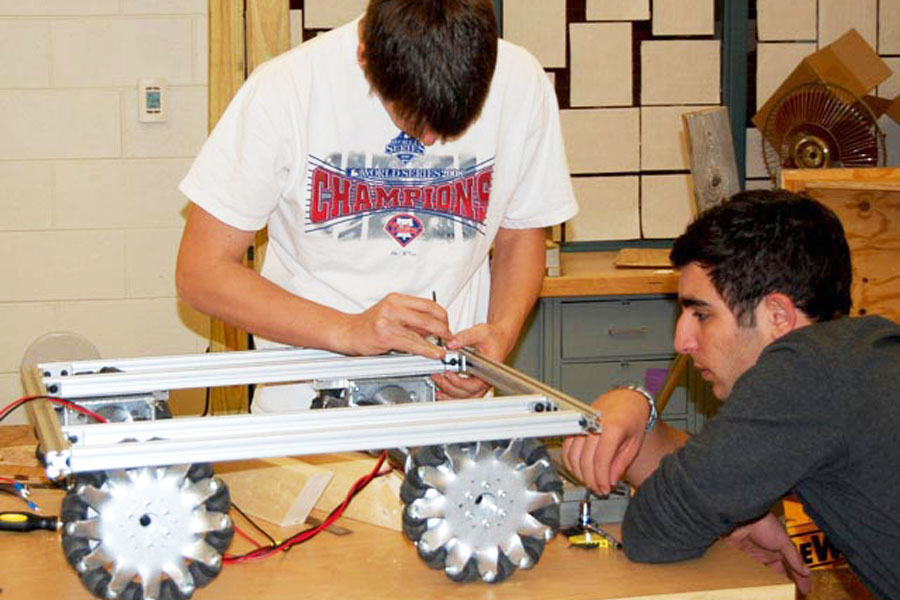
The 2010 GM Industrial Design Award winner is the most sophisticated robot created by Team Nemesis to date. Andy’s mecanum wheels were a challenge to the team — maybe even a nightmare. After realizing that the code samples posted on the Internet were flat out wrong, the intellect kicked in. Armed with sharp heads for math, physics and mad programming skills, the programmers started from scratch to perfect the algorithm that gave Andy the muscle, agility and speed to be a strong performer in any position on the soccer field.
Short, squat and compact, Andy could zip through the tunnels from zone-to-zone, playing defense, midfield or attack, adapting as needed. Too powerful for its own good, Andy’s spring loaded kicker would periodically tear itself apart during practice. In competition, Andy’s flexible design and powerful kick allowed him to finesse a ball into the goal, or punch one across the entire field of play into the net.
Andy is a blast to drive, a terror on the field and a true legacy to the FIRST spirit that embodies Andy Borowski.
The Challenge
Breakaway
Breakaway is a soccer-themed challenge. It is played on a field with four goals and two towers (two goals and one tower are allotted for each alliance). Two “bumps” divide the field into three zones. The robots can travel freely between zones by going through a tunnel under the tower or by climbing over the bumps; however, there are limits to how many robots can be in each zone. This year, alliances are going to need to strategize and work together to score points and block the opposing alliance's scoring opportunities.
The alliances will attempt to outscore each other by shooting balls into the goals. Robots can score from anywhere on the field and may attempt to defend by blocking the opposing alliance’s shots on goal. Robots cannot “carry” balls; they must kick or roll them across the field to score. In the final 20 seconds of the match, points can be earned by climbing the alliance tower or platform; for example, a robot could be equipped with a hook allowing it to grip the bar of the alliance tower and hoist itself up. Two points are awarded for an “elevated” robot. The final way an alliance can earn points is by having a robot lift another alliance robot off the playing field. This is called a “suspended” robot and earns a total of three points!
Each match lasts for 2 minutes and 15 seconds, beginning with a 15-second “autonomous period” in which the robot functions on its own using instructions programmed by the team. Then it is time for the drivers to take control during the “teleoperated period” which lasts until the end of the game